«Разработка САУ рукой робота» - Курсовая работа
- 13.10.2020
- 44
- 537
Содержание
Введение
Выдержка из текста работы
Заключение
Список литературы
Автор: admin
Содержание
Введение 4
1 Исходные данные 6
2. Дифференциальные уравнения электромеханической системы 8
2.1 Классическая форма записи уравнений 8
2.2 Уравнения состояний системы управления и двигателя 9
3. Структурная схема электромеханической следящей системы 11
3.1.Блок-схема электромеханической следящей системы 11
3.2 Структурная схема САР скорости с развернутой структурной схемой двигателя 11
3.3 Структурная схема электромеханической следящей системы с свернутой структурной схемой двигателя 12
3.4 Передаточные функции САР скорости по управлению в tf-форме и разомкнутой и замкнутой электромеханической следящей системы 12
4. Анализ электромеханической следящей системы 13
4.1 Анализ устойчивости 13
4.1.1 Анализ устойчивости по характеристическому уравнению 13
4.1.2. Анализ устойчивости по корням характеристического уравнения 14
4.1.3. Анализ устойчивости по распределению корней 14
4.1.4. Анализ устойчивости по nyquist 16
4.1.5. Анализ устойчивости по ЛАЧХ и ЛФЧХ разомкнутой системы 17
4.2. Анализ показателей качества САР скорости и СС 17
4.2.1. Анализ показателей качества САР скорости 17
4.2.2. Анализ показателей качества СС 19
4.3. Анализ точности скорректированной системы 20
4.3.1. Скоростная ошибка системы 20
4.3.2. Позиционная ошибка САР скорости 21
5. Коррекция двухконтурной электромеханической следящей системы 23
5.1. Коррекция САР скорости 23
5.2. Коррекция с П-регулятором 27
6. Анализ чувствительности и точности САР скорости 29
6.1. Анализ чувствительности по отклонению от заданного параметра 29
7. Коррекция электромеханической следящей системы в пространстве состояний 31
7.1. Структурная схема и матрично-векторное описание системы с доступом к переменным состояниям 31
7.2. Структурная схема и матрично-векторное описание системы с модальным регулятором 34
8 Реализация цифрового модального регулятора для скорректированной системы 38
9. Исследование электромеханической системы с наблюдением 40
Заключение 43
Список литературы 44
Введение
Автоматизация промышленности стала в последние десятилетия одним из приоритетных условий развития производства. Роботизация производственных процессов приводит к росту объемов выпускаемой продукции, снижению себестоимости и к значительной экономии сырья, повышает безопасность производства.
Одно из самых прогрессивных направлений в комплексной механизации производства - внедрение автоматического управления с использованием микропроцессоров, то есть роботизация. Промышленные роботы представляют собой электромеханические, пневматические или гидравлические устройства, которые подчиняются командам операторов либо работают при помощи технологии искусственного интеллекта.
На сегодняшний день по всему миру работает уже более 1,5 млн. роботов. Из них более половины (около 800 тысяч) используется в промышленности, главным образом на конвейерной сборке продукции. Использование инновационных технологий уверенно ведет промышленность к тому, чтобы все основные производственные задачи решались интеллектуальными системами.
Следующим этапом в этом процессе может стать использование в промышленности андроидных роботов. В отличие от узкоспециализированных промышленных роботов, андроиды (неиндустриальные роботы) - универсальные механизмы, которые могут быть интегрированы в любую сферу человеческой деятельности. Представляя собой периферийные компьютерные устройства, они могут без потери времени переключаться на выполнение новой задачи в момент запуска соответствующей программы.
Не случайно разработка и производство андроидов прогнозируется специалистами в качестве одного из самых прибыльных направлений развития индустрии XXI века - по оценкам, рынок андроидов уже через 10 лет составит около 30 млн. экземпляров. Немаловажные стимулы роботизации промышленности - эффективность и высокий КПД роботов, а также простота в обслуживании и перепрограммировании.
Целью данной курсовой работы является разработка САУ рукой робота. Данный элемент робота должен обеспечивать возможность захвата и удержания объектов. Кроме того, система должна отвечать всем заданным в техническом задании параметрам, обеспечивая достаточное быстродействие, а самое главное - точность регулирования.
Выдержка из текста работы
1 Исходные данные
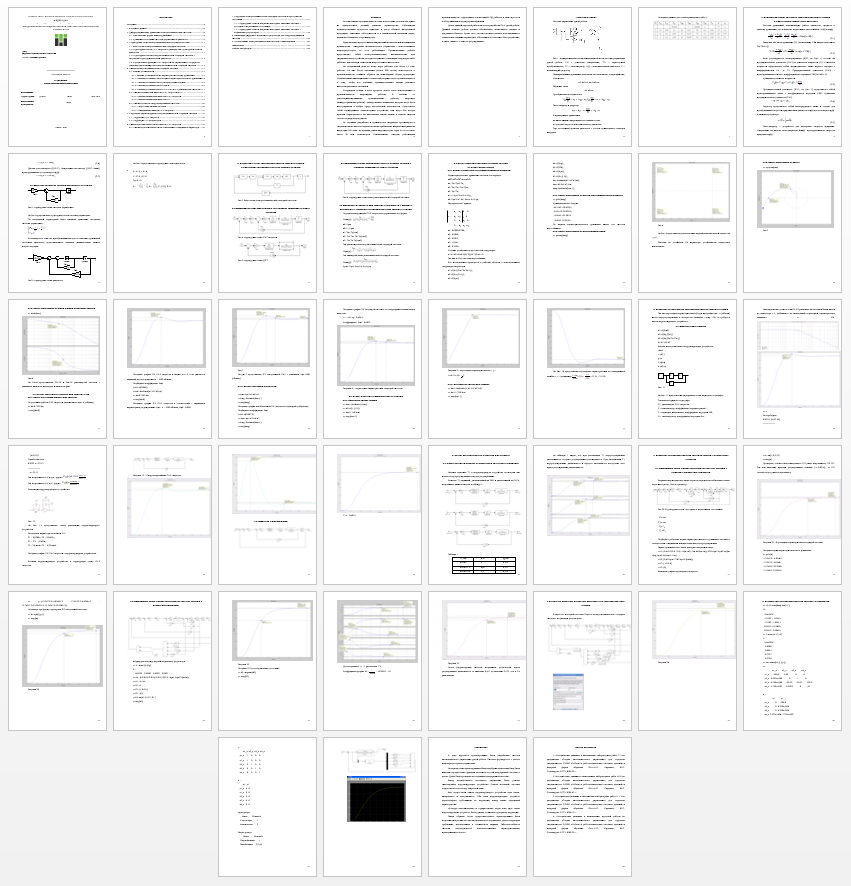
Система управления рукой робота
Рис. 1. Функциональная схема неизменяемой части системы управления рукой робота: УН – усилитель напряжения; ТП – тиристорный преобразователь; ТГ – тахогенератор; ИД – исполнительный двигатель; Р – понижающий редуктор
Линеаризованные уравнения элементов системы имеют следующий вид.
Усилители
u2=ku1*u1, uoc=ku2*uтг
Обратная связь
u3=u2-uoc
Преобразователь и двигатель
Т_пр 〖du〗_я/dt+u_я= k_пр*u_3,T_дв dω/dt+ω= k_дв*u_я
Тахогенератор и редуктор
u_тг=k_тг*ω ,(dα_1)/dt= k_p*ω
В приведенных уравнениях:
u1, u2,u3, uтг, uос – напряжения постоянного тока,
ɷ– угловая скорость исполнительного двигателя,
Тпр– постоянная времени двигателя с учетом приведенного момента нагрузки.
Исходные данные для схемы приведены в табл. 1.
2. Дифференциальные уравнения электромеханической системы
2.1 Классическая форма записи уравнений
Система уравнений, описывающих работу двигателя, сводится к единому уравнению, где в качестве переменных две величины: UH(t) и ωвр(t).
(2.1)
Разделим обе части уравнения (2.1) на величину СЕ и введем константы Тм, ТЯ и КД.
(2.2)
Блок регулируемого электропривода (БРП, см Рис. 1) состоит из предварительного усилителя (ПУ2) и усилителя мощности (У). Усилитель мощности представляет собой апериодическое звено первого порядка с коэффициентами КУ и ТУ. Предварительный усилитель (ПУ2) – пропорциональное звено с коэффициентом передачи КПУ2 (см табл. 2).
Уравнение усилителя мощности:
(2.3)
Предварительный усилитель (ПУ1, см Рис. 1) представляет собой пропорциональное звено с коэффициентом передачи КПУ1. Уравнение предварительного усилителя (ПУ1):
; (2.4)
Редуктор представляет собой интегрирующее звено и служит для преобразования скорости вращения вала двигателя ωдв(t) в угол поворота φp(t). Уравнение редуктора:
(2.5)
Тахогенератор – устройство для измерения скорости вращения. Напряжение на выходе тахогенератора Uвых(t) пропорционально скорости вращения ωвр(t).
Заключение
В ходе курсового проектирование была разработана система автоматического управления рукой робота. Система формируется с учетом микропроцессорного управления.
На первом этапе проектирования была подобрана элементная база, были найдены передаточные функции элементов и всей непрерывной системы в целом. Далее было проведено исследование непрерывной системы.
Ввиду недопустимого системного управления было решено синтезировать корректирующее устройство. Синтез желаемой системы осуществлялся по методу запретной зоны.
Был осуществлен синтез корректирующего устройства двух типов: аппаратного и программного. Оба типа корректирующих устройств удовлетворяют требованиям по коррекции, ввиду явных улучшений характеристик.
Исследуя положительные и отрицательные черты этих двух типов корректирующих устройств, было решено установить программу коррекции.
Таким образом, после продолжительного проектирования была получена дискретная система автоматического управления, удовлетворяющая требования, поставленным в техническом задании. Работоспособность системы подтверждается многочисленными характеристиками, приведенными в отчете.
Список литературы
1. Методические указания к выполнению лабораторных работ 1-5 по дисциплине «Теория автоматического управления» для студентов специальности 210300 «Роботы и робототехнические системы» дневной и вечерней формы обучения /Сост.А.П. Харченко, Ю.С. Слепокуров.:ВГТУ,2004.23 с.
2. Методические указания к выполнению лабораторных работ 6-10 по дисциплине «Теория автоматического управления» для студентов специальности 210300 «Роботы и робототехнические системы» дневной и вечерней формы обучения /Сост.А.П. Харченко, Ю.С. Слепокуров.:ВГТУ,2004.47 с.
3. Методические указания к выполнению лабораторных работ 11-12 по дисциплине «Теория автоматического управления» для студентов специальности 210300 «Роботы и робототехнические системы» дневной и вечерней формы обучения /Сост.А.П. Харченко, Ю.С. Слепокуров.:ВГТУ,2006.17 с.
4. Методические указания к выполнению курсовой работы по дисциплине «Теория автоматического управления» для студентов специальности 210300 «Роботы и робототехнические системы» дневной и вечерней формы обучения Сост.А.П. Харченко, Ю.С. Слепокуров.:ВГТУ,2008.29 с.
Предварительный просмотр
| Тема: | «Разработка САУ рукой робота» | |
| Раздел: | Радиоэлектроника | |
| Тип: | Курсовая работа | |
| Страниц: | 44 | |
| Стоимость текста работы: | 1300 руб. |
Закажите авторскую работу по вашему заданию.
- Цены ниже рыночных
- Необходимый уровень антиплагиата
- Прямое общение с исполнителем вашей работы
- Бесплатные доработки и консультации
- Минимальные сроки выполнения
- Пишем сами, без нейросетей
Мы уже помогли 24535 студентам
Средний балл наших работ
- 4.89 из 5
написания вашей работы
Предыдущая работа
Страхи и пристрастия детей с РДАСледующая работа
Предварительный договор в гражданском праве-
ВКР:
137 страниц(ы)
ВВЕДЕНИЕ 3
ГЛАВА 1. ТЕОРЕТИЧЕСКИЕ ПОДХОДЫ К ДОПОЛНИТЕЛЬНОМУ ПРОФЕССИОНАЛЬНОМУ ОБРАЗОВАНИЮ ПО РОБОТОТЕХНИКЕ ДЛЯ СТУДЕНТОВ ВЫПУСКНЫХ КУРСОВ 71.1. Содержательные линии курса робототехники и его место в современном образовании 7РазвернутьСвернуть
1.2. Использование комплектов программируемых роботов в образовательной сфере 23
ГЛАВА 2. ПРАКТИЧЕСКИЕ АСПЕКТЫ РАЗРАБОТКИ И МЕТОДИЧЕСКОГО СОПРОВОЖДЕНИЯ ПРОГРАММЫ ДОПОЛНИТЕЛЬНОГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ПО РОБОТОТЕХНИКЕ ДЛЯ СТУДЕНТОВ ВЫПУСКНЫХ КУРСОВ 31
2.1. Анализ учебной и методической литературы по использованию комплекта программируемых роботов при обучении информатике 31
2.2. Методика обучения «основам робототехники» 38
2.3. Дидактические принципы, цель и содержание комплекса занятий «Основы робототехники» 38
ЗАКЛЮЧЕНИЕ 62
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 64
ПРИЛОЖЕНИЯ 73
-
Дипломная работа:
Разработка web-сайта для дизайн-студии
62 страниц(ы)
Введение 3
1. Теоретическая часть 6
1.1 Классификации сайтов 6
1.2 Структура сайта 11
1.3 Анализ аналогичных сайтов 202. Практическая часть 27РазвернутьСвернуть
2.1 Нормативная документация 27
2.2 Разработка структуры сайта 35
2.3 Создание шапки сайта 38
2.4 Верстка сайта 44
Заключение 52
Список литературы 54
Приложения 56
-
Дипломная работа:
Анализ хозяйственной деятельности предприятия и разработка предложений по улучшению его работы
90 страниц(ы)
ВВЕДЕНИЕ 3
1. СОВРЕМЕННОЕ СОСТОЯНИЕ ООО «БАНАНА-МАМА» 5
1.1. История создания и развития. Организационно-правовая форма. Цели и виды деятельности 51.2. Характеристика товаров, работ и услуг 6РазвернутьСвернуть
1.3. Структура управления, персонал и оплата труда 9
1.4. Внешнее окружение и маркетинг в организации 18
2. ЭКОНОМИЧЕСКИЙ АНАЛИЗ ДЕЯТЕЛЬНОСТИ ООО «БАНАНА-МАМА» 23
2.1. Динамика основных экономических показателей 23
2.2. Анализ основных и оборотных средств организации 25
2.3. Анализ себестоимости продукции 33
2.4. Анализ финансового состояния 35
2.5. Анализ прибыли и рентабельности 42
3. АНАЛИЗ ХОЗЯЙСТВЕННОЙ ДЕЯТЕЛЬНОСТИ ООО «БАНАНА-МАМА» И ПУТИ УЛУЧШЕНИЯ ЕГО РАБОТЫ 45
3.1. Теоретические вопросы анализа хозяйственной деятельности предприятия 45
3.2. Выявление основных проблем деятельности предприятия и построение «дерева проблем» 52
3.3. Разработка вариантов управленческих решений по улучшению работы предприятия 54
4. ВЫБОР И ОБОСНОВАНИЕ РЕШЕНИЯ ПО УЛУЧШЕНИЮ РАБОТЫ ООО «БАНАНА-МАМА» 61
4.1. Расчет потребности в ресурсах для реализации предлагаемых решений 61
4.2. Источники формирования ресурсов для реализации решений 66
4.3. Анализ достоинств и недостатков предлагаемых решений 67
4.4. Выбор управленческого решения 68
4.5. План реализации проекта 74
ЗАКЛЮЧЕНИЕ 76
СПИСОК ЛИТЕРАТУРЫ 79
ПРИЛОЖЕНИЯ….82
-
Дипломная работа:
Разработка «виртуальной школы»
32 страниц(ы)
ВВЕДЕНИЕ 3
Глава 1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАЗРАБОТКИ “ВИРТУАЛЬНОЙ ШКОЛЫ” 5
Описание организационной структуры и видов деятельности виртуальной школы 5Обзор существующих аналогов проектируемой системы 8РазвернутьСвернуть
Анализ и выбор методологии и средств проектирования и разработки 10
Вывод по главе 1 16
Глава 2. ПРОЕКТИРОВАНИЕ ИНФОРМАЦИОННОЙ СИСТЕМЫ “ВИРТУАЛЬНАЯ ШКОЛА” 17
2.2. Статистические диаграммы 17
2.3. Динамические диаграммы 23
Вывод по главе 2 26
Глава 3. РАЗРАБОТКА СИСТЕМЫ “ВИРТУАЛЬНАЯ ШКОЛА” 27
Описание экранных форм 27
Вывод по главе 3 31
ЗАКЛЮЧЕНИЕ 32
-
Дипломная работа:
48 страниц(ы)
Инеш.
I бүлек. Тел ғилемендә концепттарҙың өйрәнелеү тарихы.
1.1. Дөйөм тел ғилемендә концепттарҙың өйрәнелеү тарихы.1.2. Башҡорт тел ғилемендә концепттарҙың өйрәнелеү тарихы.РазвернутьСвернуть
II бүлек. Мостай Кәримдең “Оҙон-оҙаҡ бала саҡ” повесында әҙәп-әхлаҡ концепттары.
2.1. Намыҫ концепты.
2.2. Гонаһ концепты.
2.3. Оят концепты
III бүлек. Башҡорт теле дәрестәрендә Мостай Кәримдең “Оҙон-оҙаҡ бала саҡ” повесы миҫалында әҫәп-әхлаҡ концепттарын өйрәнеү.
3.1.Башҡорт теле дәрестәрен лингвокультурологик йүнәлештә уҡытыу.
3.2. Башҡорт теле дәрестәрендә Мостай Кәримдең “Оҙон-оҙаҡ бала саҡ” повесы миҫалында әҙәп-әхлаҡ концептарын ҡулланыу алымдары.
-
Дипломная работа:
Разработка мобильного тренажера по предмету «математика» для учащихся начальных классов
86 страниц(ы)
ВВЕДЕНИЕ 7
Глава 1. АНАЛИТИЧЕСКАЯ ЧАСТЬ 10
1.1. Описание предметной области 10
1.2. Анализ существующих игровых тренажеров по математике 141.3. Требования к игровому тренажеру 18РазвернутьСвернуть
1.4. Обзор инструментальных средств разработки 19
1.4.1. Игровой движок Unity 19
1.4.2. Графический редактор Figma 22
1.4.3. Графический редактор Adobe Illustrator 22
1.4.4. Редактор трехмерной графики Blender 23
1.4.5. Язык моделирования UML 25
1.5. Технология создания программного тренажера в среде Unity 26
Глава 2. ПРОЕКТИРОВАНИЕ МОБИЛЬНОГО ПРИЛОЖЕНИЯ 27
2.1. Постановка задачи 27
2.2. Варианты использования приложения 27
2.3. Статическая структура приложения 29
2.4. Генерация и движение игрового мира 30
2.5. Генерация математических задач 31
2.6. Состояния игрового персонажа 31
2.7. Проектирование пользовательского интерфейса 32
Глава 3. РЕАЛИЗАЦИЯ МОБИЛЬНОГО ПРИЛОЖЕНИЯ 35
3.1. Анимация игрового персонажа 35
3.2. Реализация пользовательского интерфейса 37
3.3. Реализация игрового мира 42
3.4. Файловая структура приложения 45
3.5. Сборка программы 46
ЗАКЛЮЧЕНИЕ 49
ЛИТЕРАТУРА 50
ПРИЛОЖЕНИЯ 52
-
Курсовая работа:
Процесс организации самостоятельных работ младших школьников
33 страниц(ы)
ВВЕДЕНИЕ 3
1. Сущность и значение самостоятельной деятельности учащихся 6
1.1. Самостоятельная работа учащихся, её признаки и условия организации. 61.2. Классификация самостоятельных работ 10РазвернутьСвернуть
1.3. Значение самостоятельных работ в обучении младших школьников 15
Вывод 18
2. Анализ и проведение опытно-экспериментальной работы по проблеме исследования 19
2.1. Общая характеристика младшего школьника, его учебной и игровой деятельности 19
2.2. Подготовка и проведение педагогического эксперимента 22
2.3. Анализ результатов исследования 24
Вывод 27
ЗАКЛЮЧЕНИЕ 28
СПИСОК ЛИТЕРАТУРЫ 30
ПРИЛОЖЕНИЯ 32 -
Реферат:
Русская детская литература XVII-XVIII веков
13 страниц(ы)
Введение …3
Глава 1. Русская детская литература XVII века ….4
1.1. С. Полоцкий …. ….5
1.2. К. Истомин ….6
Глава 2. Детская русская литература XVIII века …. ….62.1. Екатерина II ….7РазвернутьСвернуть
2.2. Д.И. Фонвизин …. ….9
2.3. Н.Е. Новиков …. ….9
2.4. Н.М. Карамзин …. 10
Заключение …12
Список используемой литературы …. .13
-
Контрольная работа:
Интернет, поиск информации, социальные ресурсы Интернет
21 страниц(ы)
Введение 3
1. Интернет и его функции 4
2. Поиск информации в Интернет 10
3. Социальные ресурсы Интернет 16
Заключение 20
Список используемой литературы 21
-
Практическая работа:
14 страниц(ы)
Ситуация 1
Представьте, что к Вам, как к специалисту в области социального обеспечения за консультацией обратился гражданин Иванов Иван Иванович 26.01.1958 г., родившийся в г. Перми, паспорт серия 5704 № 384955, выдан УВД Ленинского района г. Перми 02.02.2020, проживающий по адресу г. Пермь, ул. Ким д. 1, кв 1., страховое свидетельство государственного пенсионного страхования 100-200-300-10. Детей нет, холост.Иванову И. И., 65 лет, страховой стаж 40 лет, работал в Юридическом бюро юристом 1 категории. Проходил военную службу по призыву в период с 01.04.1976 по 01.04.1978. Его индивидуальный пенсионный коэффициент 89 баллов.РазвернутьСвернуть
Вопросы и задания к Ситуации 1:
1. Имеет ли Иванов И.И. право на назначение страховой пенсии по старости?
2. Если Иванов И.И. имеет право на назначение страховой пенсии по старости, то какие документы ему понадобятся для подтверждения данного юридического факта?
3. Составьте заявление о назначении пенсии от имени Иванова И.И. Данные впишите в БЛАНК ЗАЯВЛЕНИЯ О НАЗНАЧЕНИИ ПЕНСИИ
Ситуация 2
В результате несчастного случая на производстве 01.02.2023 г. Матвеев Илья Ильич потерял профессиональную трудоспособность на 40 %. В связи с полученной травмой ему необходим постоянный медицинский уход и ежегодное санаторно-курортное лечение.
Матвеев И.И. 01.05.1978 года рождения работал в ООО «Металлсборка» столяром с 01.02.1995 года по настоящее время. Проживает в Свердловском районе г. Перми, по адресу: г. Пермь, ул. Чкалова, д.12, кв.12. Паспорт серия 5704 № 112233, выдан УВД Свердловского района г. Перми 08.05.1994. Страховое свидетельство обязательного пенсионного страхования 100-200-300-10.
Средний заработок Матвеева за последние 12 месяцев работы по трудовому договору перед получением травмы составил 25 тыс. руб. В этот же период за работу, выполненную по договору подряда, он получил вознаграждение в сумме 24 тыс. руб.
Вопросы и задания к Ситуации 2:
1 На какие страховые выплаты имеет право Матвеев И.И.?
2 Укажите размеры страховых выплат, согласно условиям задачи.
3 Составьте заявление о назначении единовременной страховой выплаты от имени Матвеева И.И. Данные впишите в БЛАНК ЗАЯВЛЕНИЯ О НАЗНАЧЕНИИ ЕДИНОВРЕМЕННОЙ СТРАХОВОЙ ВЫПЛАТЫ.
-
Контрольная работа:
26 страниц(ы)
1 Эмпирическая социология 3
2 Структурно-функциональное направление в социологии 6
3 Теория социального конфликта 154 Индустриальная социология и теория "человеческих отношений" Э. Мэйо" 22РазвернутьСвернуть
Список литературы 26 -
Контрольная работа:
Теория последовательных наступательных операций
35 страниц(ы)
Введение 3
1 Сущность теории последовательной наступательной операции 5
2 Последовательная операция: ход и тем продвижения войск 73 Размах последовательных операций 11РазвернутьСвернуть
4 Характер действий ударных группировок 16
5 Управление последовательной наступательной операцией 28
Заключение 35
Список литературы 36
-
Контрольная работа:
20 страниц(ы)
1. Учение Платона об «идеях» (эйдосах). Идеи и вещи_
1.1. Идеи и вещи_
2. Смысл «идеализма» в философии_
3. Учение Платона о душе, «эросе» и «припоминании»_4. Платон о Едином и Благе_РазвернутьСвернуть
5. Проект идеального государства_
Использованная литература_
-
Контрольная работа:
Товароведение и экспертиза в таможенном деле и ТН ВЭД
13 страниц(ы)
1. Охарактеризуйте иерархический метод классификации. Укажите достоинства и недостатки данного метода. Приведите примеры 32. В каких случаях предварительные решения по классификации товаров в соответствии с ТН ВЭД прекращают своё действие? При обосновании ответа укажите статью Таможенного кодекса ЕАЭС 4РазвернутьСвернуть
3. Какова процедура контроля правильности исчисления таможенных платежей? 4
4. Какие специфические термины и понятия применяются в ТН ВЭД в отношении товаров раздела XVI? 6
5. Какие товары в ТН ВЭД классифицируются как разные готовые изделия группы 96? 7
6. Определите согласно ТН ВЭД код следующих товаров, в ответе сошлитесь на применённые Вами правила из Основных правил интерпретации, примечания к разделам и группам. 9
Список литературы 14
-
Контрольная работа:
Содержание и условия гражданско-правового договора. Завещание: понятие, содержание, виды.
20 страниц(ы)
Введение ….3
1.Содержание и условия гражданско-правового договора…4
2.Отличие обязательств подрядного типа от обязательств по оказанию услуг3.Завещание: понятие, содержание, виды….10РазвернутьСвернуть
Практическое задание….14
Заключение …17
Список использованных источников….19
-
Контрольная работа:
Ответственность за нарушение земельного законодательства
11 страниц(ы)
1. Ответственность за нарушение земельного законодательства 3
2. Задача 9
Список литературы 12
